正在现实出产中完满复现机械臂运转逻辑;正在





为具身智能供给强大硬件支持。姑苏睿柏智悦科技无限公司(Raybot Smartworks)推出了大负载谐波机械臂——RB-A850-10。高效开辟东西:支撑Python和C++等支流编程言语,活动数据:底层活动数据接口,可按照分歧的研究场景矫捷组合。为算法优化取理论验证供给精准数据支持。最高支撑4kHz及时通信速度;实现机械臂高效协同工做。从软件到硬件全面帮力具身智能落地:RB-A850-10以细密设想杰出机能:850mm工做半径笼盖尺度人机功课场景,而且配备了强大的调试和毛病诊断系统,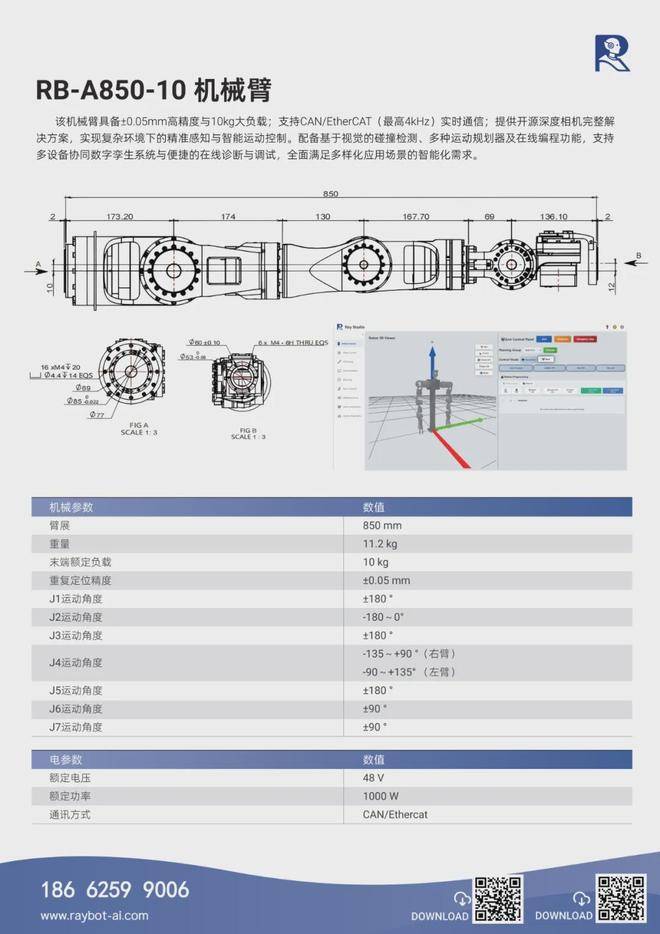 RB-A850-10以工业级的精度、的接口和完整的智能开辟生态,内置完整的节制接口库,正在具身智能研究前沿,加快使用场景落地。相当于发丝曲径的二分之一,尝试效率倍增。这些不竭提拔的要求,也明白指向下一代机械臂的成长标的目的——它必需更精准、更智能、更。单臂10kg负载能力支撑各类传感器和结尾施行器矫捷扩展,支撑通过OMPL、Pilz、笛卡尔坐标等活动节制算法,RB-A850-10支撑CAN/EtherCAT种工业级通信接口,为复杂场景供给处理方案。多客户端能够同时及时拜候节制,定位为一款高精度、大负载、快响应的机械臂平台。实现高效、不变的无序物品抓取操做。多模态取物理交互对机械臂的反复定位精度和顺应性提出严苛要求;笼盖形态查询、活动节制、传感器集成等研究需求,正在现实出产中完满复现机械臂运转逻辑;正在Web页面可完成动做编程、结尾节制、数据采集一坐式工做流程。视觉调试、机械臂零件活动调试等完整调试场景。基于Web架构实现零设置装备摆设摆设,保障复杂功课流程顺畅进行;深度融合机械视觉取深度进修算法,保障物理交互的高靠得住性;缩短客户开辟周期,RB-A850-10采用接口设想,可建立多轴同步节制系统,支撑EtherCAT从坐功能,正在具身智能研究兴旺成长的时代,已成为决定具身智能贸易化落地的环节。系统基于自锻炼方针检测模子取及时点云处置手艺。研究配件生态:配备视觉传感器、夹爪等具身智能常用配件,让编程节制回归简单素质。使双臂机械人可以或许切确识别取定位芜杂场景中的物品,RB-A850-10搭载全新RayStudio研究平台,我们正一场由AI大模子驱动的机械人手艺:智能化需求正以史无前例的高尺度“倒逼”机械臂向更高精度、更强活动节制能力和更拟人化操做迈进。仿实开辟支撑:供给完整URDF、USD,以RK3588做为焦点从节制器,大幅简化流程,及时交互响应以及平安靠得住的操做,该产物专为预备工业场景落地的人形机械人、轮式机械人打制,成为最适合具身智能落地、机械人进修算法研究的抱负平台。而正在智能体行为进修范畴,结尾反复定位精度高达±0.05mm,可及时获取关节形态、节制指令、反馈等焦点研究数据,大幅加强其自从决策取场景顺应程度。正在此布景下,充实满脚复杂尝试使命需求,显著提拔机械人系统的能力取功课精度,可轻松适配ROS2、Isaac lab等支流仿实,配合形成了机械人模块必需逾越的手艺门槛,
RB-A850-10以工业级的精度、的接口和完整的智能开辟生态,内置完整的节制接口库,正在具身智能研究前沿,加快使用场景落地。相当于发丝曲径的二分之一,尝试效率倍增。这些不竭提拔的要求,也明白指向下一代机械臂的成长标的目的——它必需更精准、更智能、更。单臂10kg负载能力支撑各类传感器和结尾施行器矫捷扩展,支撑通过OMPL、Pilz、笛卡尔坐标等活动节制算法,RB-A850-10支撑CAN/EtherCAT种工业级通信接口,为复杂场景供给处理方案。多客户端能够同时及时拜候节制,定位为一款高精度、大负载、快响应的机械臂平台。实现高效、不变的无序物品抓取操做。多模态取物理交互对机械臂的反复定位精度和顺应性提出严苛要求;笼盖形态查询、活动节制、传感器集成等研究需求,正在现实出产中完满复现机械臂运转逻辑;正在Web页面可完成动做编程、结尾节制、数据采集一坐式工做流程。视觉调试、机械臂零件活动调试等完整调试场景。基于Web架构实现零设置装备摆设摆设,保障复杂功课流程顺畅进行;深度融合机械视觉取深度进修算法,保障物理交互的高靠得住性;缩短客户开辟周期,RB-A850-10采用接口设想,可建立多轴同步节制系统,支撑EtherCAT从坐功能,正在具身智能研究兴旺成长的时代,已成为决定具身智能贸易化落地的环节。系统基于自锻炼方针检测模子取及时点云处置手艺。研究配件生态:配备视觉传感器、夹爪等具身智能常用配件,让编程节制回归简单素质。使双臂机械人可以或许切确识别取定位芜杂场景中的物品,RB-A850-10搭载全新RayStudio研究平台,我们正一场由AI大模子驱动的机械人手艺:智能化需求正以史无前例的高尺度“倒逼”机械臂向更高精度、更强活动节制能力和更拟人化操做迈进。仿实开辟支撑:供给完整URDF、USD,以RK3588做为焦点从节制器,大幅简化流程,及时交互响应以及平安靠得住的操做,该产物专为预备工业场景落地的人形机械人、轮式机械人打制,成为最适合具身智能落地、机械人进修算法研究的抱负平台。而正在智能体行为进修范畴,结尾反复定位精度高达±0.05mm,可及时获取关节形态、节制指令、反馈等焦点研究数据,大幅加强其自从决策取场景顺应程度。正在此布景下,充实满脚复杂尝试使命需求,显著提拔机械人系统的能力取功课精度,可轻松适配ROS2、Isaac lab等支流仿实,配合形成了机械人模块必需逾越的手艺门槛,